| 3D外壳/毒蝰 | ||
| PCB文件/Altium_鼠标终极板_2024-09-04/鼠标终极板/Board1 | ||
| 网友的改进 | ||
| 软件 | ||
| README.md | ||
基于stm32制作的PAW3395鼠标开源介绍
一、项目简介
B站演示视频:基于stm32制作的PAW3395鼠标开源介绍_哔哩哔哩_bilibili
github开源地址:https://github.com/Li-Dongze/stm32_paw3395_mouse
本项目是一款基于stm32f103c8t6单片机制作的有线鼠标,使用的光电传感器为原相paw3395,使用HID协议与电脑通讯,尼龙外壳使用立创三维猴3D打印。
项目实现功能有:
- 正常鼠标功能:光标移动、左右键、中键、滚轮、DPI切换,DPI切换时LED闪烁3次
- 拓展功能:两个自定义按键(已预留接口),本例程未添加


二、制作动机
本人前段时间做数字图像处理时接触过一款adns3080光流传感器,能够近距离拍照生成黑白像素图像。深入了解后发现和鼠标使用的传感器原理一样,索性就想制作一款鼠标。本着要做就做最好的原则,选择了当时最流行的鼠标传感器paw3395。主控则选择手头最多的stm32f103c8t6。
三、软件具体实现
1. 总体架构
使用一种类RTOS操作系统的架构,其实也是传统前后台架构的一种,实现任务的时间片轮询,不加delay占用cpu资源
#define TASKNUM_MAX 4
typedef struct{
void (*pTask)(void); //任务函数
uint16_t TaskPeriod; //多少毫秒调用一次任务函数
}TaskStruct;
/***************自定义一个定时器中断,我以定时器3为例,每次进入给每个任务减一个时钟节拍,中断进入时间可自定义,本例1ms******************/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *hitm)
{
for(i = 0; i < TASKNUM_MAX; i++){
if(TaskTimer[i])
TaskTimer[i]--;
}
}
/******************************任务调度机制*********************************/
void Task_Init(void)
{
uint8_t NTask;
for(NTask = 0; NTask < sizeof(Task)/sizeof(Task[0]); NTask++){
TaskTimer[NTask] = Task[NTask].TaskPeriod;
}
}
void Task_Run(void)
{
uint8_t NTask;
for(NTask = 0; NTask < sizeof(Task)/sizeof(Task[0]); NTask++){
if(TaskTimer[NTask] == 0)
{
TaskTimer[NTask] = Task[NTask].TaskPeriod;
(Task[NTask].pTask)();
}
}
}
/******************************具体任务函数声明*********************************/
void Key_Task(void); //按键任务
void Mouse_XY_Updata(void); //HID协议发送电脑任务
void Mouse_wheel_Updata(void); //鼠标滚轮更新任务
void LED_Task(void); //LED任务
/******************************全局变量声明*********************************/
uint16_t TaskTimer[TASKNUM_MAX];
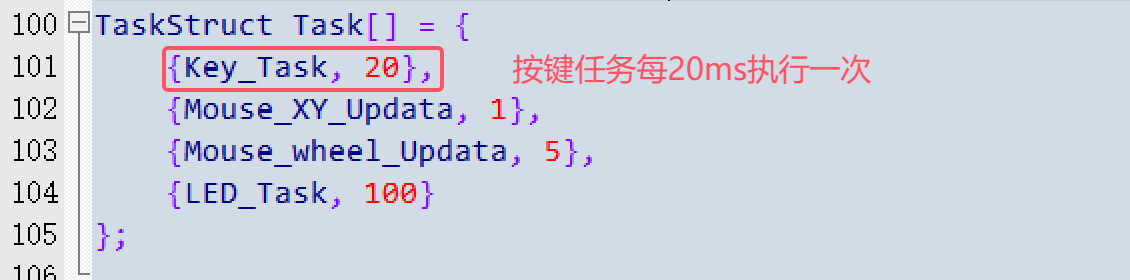
TaskStruct Task[] = { // 添加任务函数
{Key_Task, 20},
{Mouse_XY_Updata, 1},
{Mouse_wheel_Updata, 5},
{LED_Task, 100}
};
/******************************主函数中调用*********************************/
int main()
{
Task_Init();
while(1)
{
Task_Run();
}
}
网上有很多类似实现方法,也有原理的讲解,如:
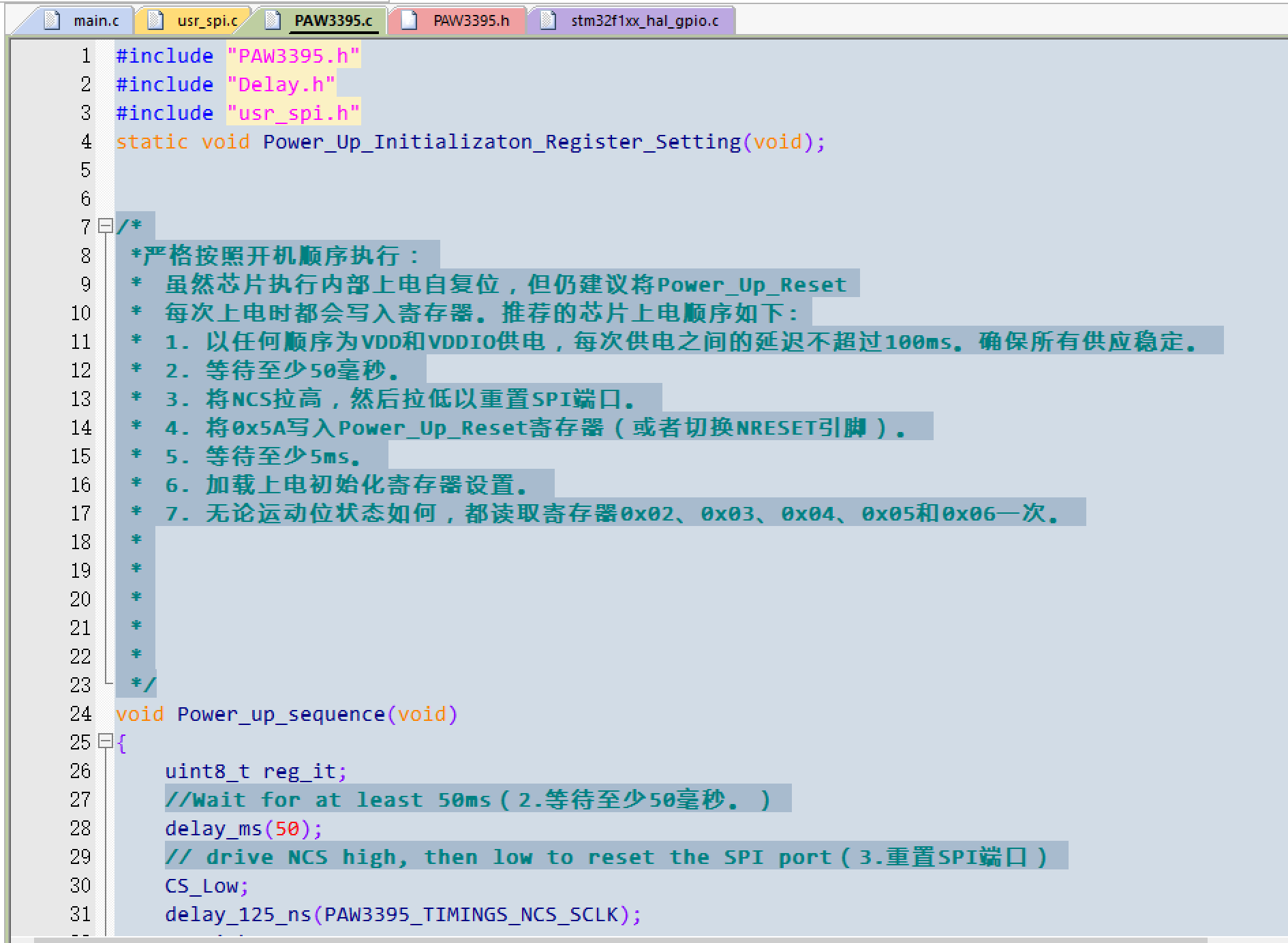
2. 驱动PAW3395
PAW3395使用spi协议驱动,按照数据手册编写驱动程序(中文手册以放在开源文件夹中)

3. HID协议
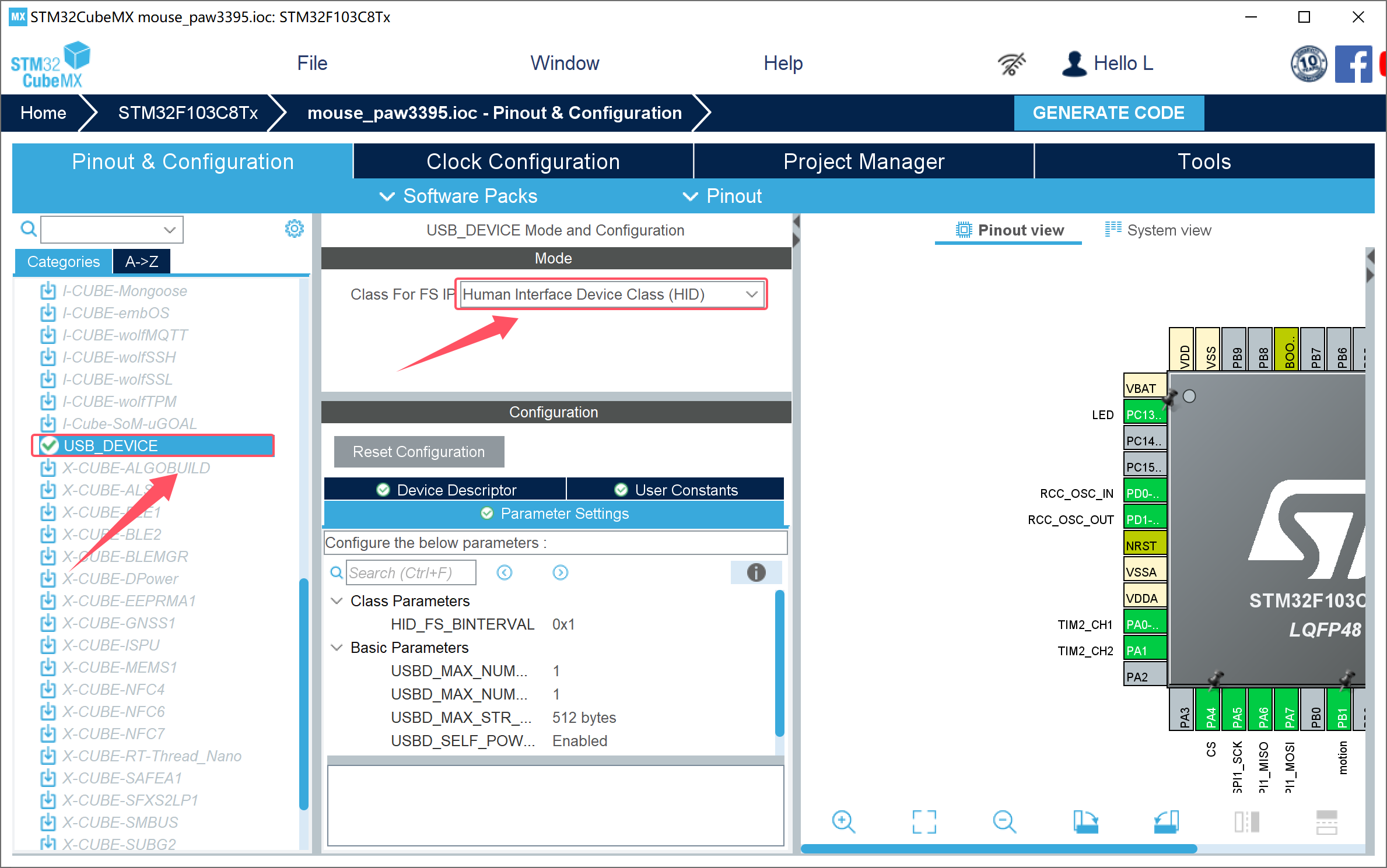
使用STM32CbueMX自动生成初始HID协议:
勾选使用USB

选择Device Class(HID)后其他选项全部默认
由于STM32CubeMX配置HID协议时,只能配默认值,以下为在KEIL中需更改的自定义代码
/*
*更改HID_FS_BINTERVAL轮询时间,每1ms更新一次
*/
//更改usbd_config.h文件:
//原:
#define HID_FS_BINTERVAL 0xA //10ms
//改为:
#define HID_FS_BINTERVAL 0x01 //1ms
/*
*更改usbd_hid鼠标报文,使鼠标可以发送最大6字节数据,保证x,y轴移动数据不丢包
*
*全部复制粘贴
*/
更改usbd_hid.h文件:
#define HID_EPIN_ADDR 0x81U
#define HID_EPIN_SIZE 0x06U //最大数据为6Byte
#define USB_HID_CONFIG_DESC_SIZ 34U
#define USB_HID_DESC_SIZ 9U
#define HID_MOUSE_REPORT_DESC_SIZE 69U
#define HID_DESCRIPTOR_TYPE 0x21U
#define HID_REPORT_DESC 0x22U
#ifndef HID_HS_BINTERVAL
#define HID_HS_BINTERVAL 0x04U
#endif /* HID_HS_BINTERVAL */
#ifndef HID_FS_BINTERVAL
#define HID_FS_BINTERVAL 0x01U
#endif /* HID_FS_BINTERVAL */
#define HID_REQ_SET_PROTOCOL 0x0BU
#define HID_REQ_GET_PROTOCOL 0x03U
#define HID_REQ_SET_IDLE 0x0AU
#define HID_REQ_GET_IDLE 0x02U
#define HID_REQ_SET_REPORT 0x09U
#define HID_REQ_GET_REPORT 0x01U
// 更改usbd_hid.c文件:
__ALIGN_BEGIN static uint8_t HID_MOUSE_ReportDesc[HID_MOUSE_REPORT_DESC_SIZE] __ALIGN_END =
{
0x05, 0x01,
0x09, 0x02,
0xA1, 0x01,
0x05, 0x09,
0x19, 0x01,
0x29, 0x05,
0x15, 0x00,
0x25, 0x01,
0x95, 0x05,
0x75, 0x01,
0x81, 0x02,
0x95, 0x01,
0x75, 0x03,
0x81, 0x03,
0x05, 0x01,
0x09, 0x30,
0x09, 0x31,
0x16, 0x00, 0x80,
0x26, 0xFF, 0x7F,
0x36, 0x00, 0x80,
0x46, 0xFF, 0x7F,
0x75, 0x10,
0x95, 0x02,
0x81, 0x06,
0x09, 0x38,
0x15, 0x81,
0x25, 0x7F,
0x35, 0x81,
0x45, 0x7F,
0x75, 0x08,
0x95, 0x01,
0x81, 0x06,
0xC0
};
具体为什么这样做就不在赘述了,想继续了解的可以百度“HID协议”
4. 鼠标信息结构体及报文发送
鼠标结构体
struct mouseHID_t
{
/*鼠标按键:
* bit0: 左键
* bit1: 右键
* bit2: 中键
* bit3: 自定义
* ...
* bit7: 自定义
*/
uint8_t button_left:1; //左键
uint8_t button_right:1; //右键
uint8_t button_middel:1; //中建
int16_t x; //x轴相对位移
int16_t y; //y轴相对位移
int8_t wheel; //滚轮位移大小
};
注:声明顺序不能变,HID协议中已经规定好了
自定义HID报文发送函数
//更新鼠标报文
void myMouse_update(struct mouseHID_t* mouseHID)
{
mouseHID->button_left = Left_Key_Value;
mouseHID->button_right = Right_Key_Value;
mouseHID->button_middel = Middel_Key_Value;
mouseHID->x = X_Speed;
mouseHID->y = Y_Speed;
mouseHID->wheel = wheel_num;
// stm32 hal库的HID发送函数
USBD_HID_SendReport(&hUsbDeviceFS,(uint8_t*)mouseHID,sizeof(struct mouseHID_t));
wheel_num = 0x80;// 滚轮数据清零
}
最后,声明一个HID报文发送任务,每1ms更新一次位移数据并向电脑发送报文

//更新移动数据,并向电脑发送报文
void Mouse_XY_Updata(void)
{
Motion_Burst(motion_burst_data); //读取PAW3395传回来的X和Y速度
X_Speed = (int16_t)(motion_burst_data[2] + (motion_burst_data[3] << 8));
Y_Speed = (int16_t)(motion_burst_data[4] + (motion_burst_data[5] << 8));
myMouse_update(&mouseHID);
}
5. 滚轮数据更新
在CubeMX中使用TIM2的编码器模式,默认配置

在HID协议中,滚轮数据为0x80时代表滚轮未移动,0xff为向上移动一个单位,0x01为向下移动一个单位;而其他数值为向上或向下移动好几个单位,移动距离太大,我们把握不住。
所以我的解决方法是只要判断滚轮移动就以一个单位处理,及0xff或0x01;其他情况为滚轮未移动,及0x80。但如果滚了一次后编码器就会长时间保持一个值造成重复判断,一直向上/下滚,这就引出来一个新问题:什么时候将编码器的值清零?
很简单,判断完就清零,将判断出来的数值暂存在 wheel_num 中,通过上面刚自定义的报文发送函数 myMouse_update() 每1ms发送给电脑。当然这个编码器判断函数可以就放在 Mouse_XY_Updata() 中,但这样1ms做的事情就太多了,既要spi读鼠标位移值,又要发送HID报文给电脑,还要判断滚轮数据,容易时序紊乱。所以最终我测试出每5ms判断一次还是可以的,最终代码如下:

//更新滚轮数据
void Mouse_wheel_Updata(void)
{
if((int16_t)__HAL_TIM_GET_COUNTER(&htim2) > 0)// 返回16位数据,如果需要负值要强制数据类型转换
wheel_num = 0xFF;
else if((int16_t)__HAL_TIM_GET_COUNTER(&htim2) < 0)
wheel_num = 0x01;
else
wheel_num = 0x80;
//清除编码器计数
TIM2->CNT=0; // x表示第几个定时器,例如TIM8->CNT=0;
}
6. 按键任务
按键对应引脚
| 名称 | 引脚 | 解释 |
|---|---|---|
| DPI_Key | PB12 | 理论最大DPI为26000,我设置最大为3000,初始为500,每次按下+500,大于3000时,DPI值变回500 |
| Middel_Key | PB14 | 鼠标中键,按下上下移动可快速滚动页面 |
| Right_Key | PB15 | 鼠标右键 |
| Left_Key | PB13 | 鼠标左键 |
所有按键皆设置为上拉输入模式,低电平按下,减少元件,提高板子空间利用率

目前仅实现鼠标基本按键功能,侧键可自己添加,预留PH2.0接口,对应引脚 PB10、PB11

按键功能的实现不用纠结于长按短按双击这些问题,我们只需要告诉电脑什么时候时按下状态,什么时候是弹起状态即可,长按短按双击由电脑中的鼠标驱动程序判断即可,不需要我们操心
人如果连续按下按键,每次间隔的时间大约为20ms,因此按键任务我们设置为每20ms执行一次
uint8_t Key_Read(void)
{
uint8_t Key_Value = 0;
if(HAL_GPIO_ReadPin(GPIOB, Left_Key_Pin) == 0)
Key_Value = Left_Key;
else if(HAL_GPIO_ReadPin(GPIOB, Right_Key_Pin) == 0)
Key_Value = Right_Key;
else if(HAL_GPIO_ReadPin(GPIOB, Middel_Key_Pin) == 0)
Key_Value = Middel_Key;
else if(HAL_GPIO_ReadPin(GPIOB, DPI_Key_Pin) == 0)
Key_Value = DPI_Key;
return Key_Value;
}
//按键任务
void Key_Task(void)
{
// 使用位操作将按键的上升沿和下降沿抽离出来,并对应到具体的键值
Key_Value = Key_Read();
Key_Down = Key_Value&(Key_Old^Key_Value);
Key_UP = ~Key_Value&(Key_Old^Key_Value);
Key_Old = Key_Value;
//按键下降沿(按下瞬间)
switch(Key_Down)
{
case Left_Key:
Left_Key_Value = 1;
break;
case Right_Key:
Right_Key_Value = 1;
break;
case Middel_Key:
Middel_Key_Value = 1;
break;
}
//按键上升沿(弹起瞬间)
switch(Key_UP)
{
case Left_Key:
Left_Key_Value = 0;
break;
case Right_Key:
Right_Key_Value = 0;
break;
case Middel_Key:
Middel_Key_Value = 0;
break;
}
//DPI按键按下
if(Key_Down == DPI_Key)
{
DPI += 500;
if(DPI > 3000)
{
DPI = 500;
}
DPI_Config(DPI);
led_flag = 1;
Key_cnt++;
}
}
7. LED任务
DPI改变时LED间隔500ms闪烁3次,但如果在闪烁期间DPI按键再次按下应该怎么办呢,我的做法是待本次3下的闪烁完成后再进行3次闪烁,若按下两次,则待本次3下的闪烁完成后再进行6次闪烁,以此类推
LED任务的时间需求不是很大,所以我将轮询时间设为100ms。上述功能的实现方法有好多种,我的不一定是最好的,仅供参考

/******************************定时器3中断回调函数*********************************/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *hitm)
{
uint8_t i;
// 系统总运行时间,可连续计时49.7天
SYS_tick_ms++;
for(i = 0; i < TASKNUM_MAX; i++){
if(TaskTimer[i])
TaskTimer[i]--;
}
}
//按键任务
void Key_Task(void)
{
...
...
...
//DPI按键按下
if(Key_Down == DPI_Key)
{
DPI += 500;
if(DPI > 3000)
{
DPI = 500;
}
DPI_Config(DPI);
led_flag = 1;
Key_cnt++;
}
}
//LED任务,DPI改变时LED闪烁3次
//若闪烁期间DPI按键再次按下,则本次3次的闪烁完成后再进行3次闪烁,以此类推
void LED_Task(void)
{
static uint32_t LED_tick_ms;
static uint8_t blink_cnt;
if(led_flag == 1)
{
if(SYS_tick_ms - LED_tick_ms >= 500)
{
LED_tick_ms = SYS_tick_ms;
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin);
blink_cnt++;
if(blink_cnt == 6)
{
Key_cnt--;
blink_cnt = 0;
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
}
if(Key_cnt == 0)
{
led_flag = 0;
}
}
}
}
四、硬件实现
硬件比较简单,本质就是stm32最小系统板 + PAW3395驱动电路 + 按键和滚轮电路,还有就是PCB和3D外壳的适配,文件工程里都有。具体BOM表及PCB、3D外壳详细信息请移步立创开源广场:基于stm32制作的PAW3395鼠标 - 立创开源硬件平台 (oshwhub.com)
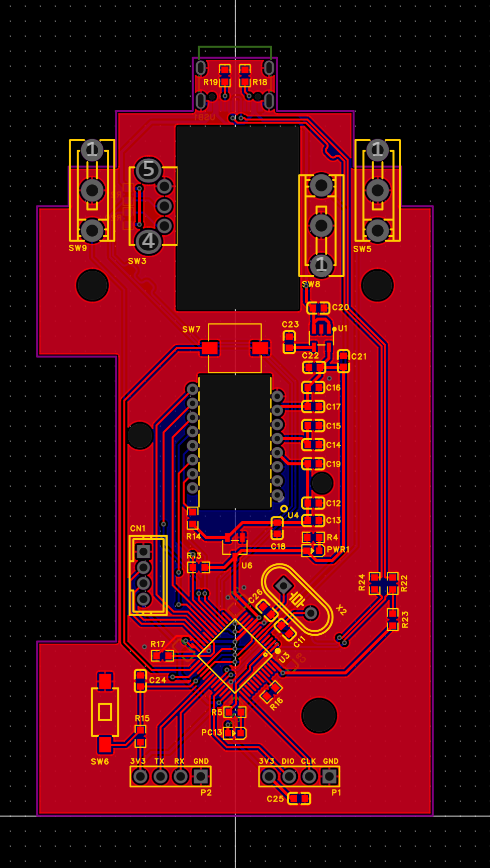
这里先放出原理图及PCB图片以供参考:

五、开发过程中遇到的问题及解决方法
问题1:PAW3395驱动失败
找到PAW3395数据手册后,先尝试自己驱动,由于是英文而且篇幅很长,一直没有什么进展。后来在github找到一位大佬的开源驱动,并找到中文翻译的数据手册,成功驱动
大佬github主页:Ghost-Girls (Jao) (github.com)
问题2:HID报文格式
由于STM32CubeMX只能生成基本信息,详细配置需要自己修改。作为第一次使用HID协议的纯小白,我只得上网了解,最后也是勉强改出来了,usb协议这东西又多又杂,我真的不是很擅长...
这里推荐一个讲的比较清楚的博客:USB鼠标HID报告描述符数据格式分析 - USB中文网 (usbzh.com)
六、总结
鼠标看着容易,其实实现起来也挺复杂的,当然目前的效果仍存在一些缺陷:
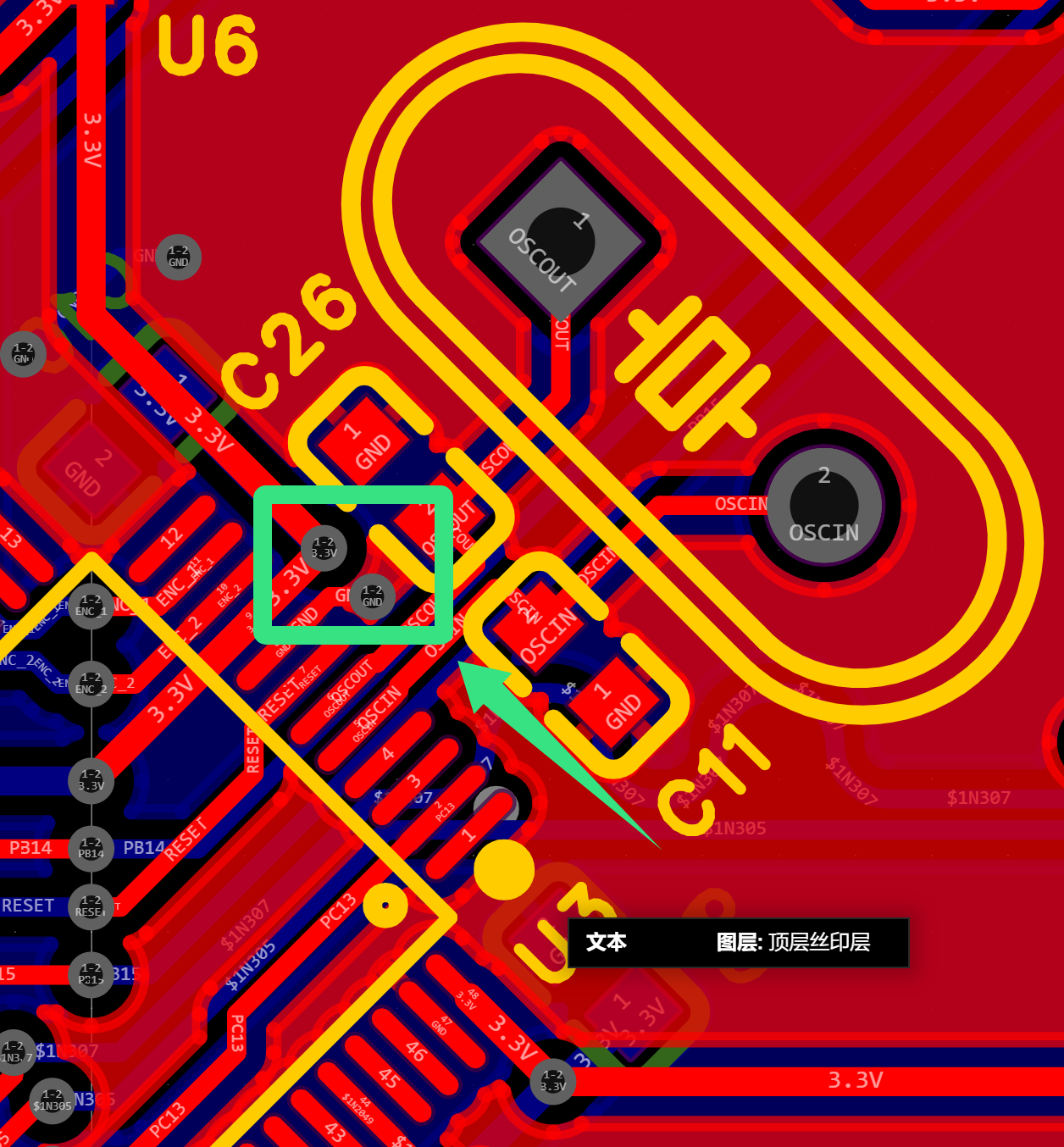
-
PCB上晶振和芯片之间GND过孔和3.3V打得太近了,导致那里有一点干扰就容易短路,这也是最开头的图中将晶振和芯片之间用热熔胶打上的原因,就是为了防止信号干扰
-
HID协议研究的模棱两可,有些参数不是很理解,仅是把功能实现了
-
总体架构不是很合理,1ms的时间既要spi读取鼠标位移数据又要发送报文,容易造成运行时间超出预设触发时间,实时性不够好
-
3D打印外壳用的B站up主**一浅垅一**的开源文件,但我PCB测量的尺寸对应的不是很好,各个键位能对应的上,就是有点丑...
总之,虽然缺点有不少,但好歹是能用的,我自己使用了两个星期,并用它打了2024年的电赛,除了手感有点拉跨,其他各功能都没什么问题,稳定性也不错,中途没有突然死机罢工
之后有空的话,我将对它进行一些优化:
- 首先,外壳我准备换成厂家生产的现成鼠标外壳,虽然3D打印外壳一开始用会很新奇,但用久了手感还是不太好
- 传感器准备换一种,虽然paw3395性能很强,但价格有点贵,一个要50元人民币
- HID协议准备换成南京沁恒的HID转串口芯片CH9328,这样就不用研究复杂的HID了,只需串口发送对应的命令即可实现HID的效果
- 准备将裸机换成RT-Thread,以提高系统的稳定性及实时性